【Pythonで学ぶ線形代数学講座(3)】ベクトルの内積
今回はベクトル同士の掛け算について学びます。ベクトルの掛け算には、内積と外積の2種類がありますが、今回は内積について考えます。内積の計算方法は特に難しくありませんが、「ベクトルの向きを揃えて掛ける」と考えるとイメージしやすいかと思います。機械学習の分野で頻繁に登場する概念なので、定義と実装方法についてマスターしておきましょう。外積については少し先の講座[09]で解説します。
内積の定義と性質
ベクトルの 内積 (inner product) は要素同士の積の総和として定義されます。
たとえば、$\boldsymbol{v}=\begin{bmatrix}2\\3\end{bmatrix}$ と $\boldsymbol{w}=\begin{bmatrix}5\\1\end{bmatrix}$ の内積は
\[\boldsymbol{v}\cdot\boldsymbol{w}=\begin{bmatrix}2\\3\end{bmatrix}\cdot\begin{bmatrix}5\\1\end{bmatrix}=2\times 5+3\times 1=13\tag{1}\]
のように計算できます。3 次元以上も同様で、一般に $n$ 次元ベクトル同士の内積は
\[\begin{align*}\boldsymbol{v}\cdot\boldsymbol{w}=&\begin{bmatrix}v_1\\v_2\\\vdots\\v_n\end{bmatrix}\cdot\begin{bmatrix}w_1\\w_2\\\vdots\\w_n\end{bmatrix}\\[6pt]=&v_1\cdot w_1+v_2 \cdot w_2+\ \cdots\ +v_n\cdot w_n\end{align*}\tag{2}\]
と定義されます。ベクトル $\boldsymbol{v}$ の自身との内積、すなわち $\boldsymbol{v}\cdot\boldsymbol{v}$ は ベクトルの大きさ(ノルム)に等しくなっています:
\[\boldsymbol{v}\cdot\boldsymbol{v}=v_1^2+v_2^2+\ \cdots\ +v_n^2=\parallel\boldsymbol{v}\parallel^2\tag{3}\]
すなわち、ベクトル $\boldsymbol{v}$ の大きさは内積を使って
\[\parallel\boldsymbol{v}\parallel=\sqrt{\boldsymbol{v}\cdot\boldsymbol{v}}\tag{4}\]
のように表せます。
内積演算においては、交換法則、結合法則、分配法則が成り立ちます。
\[\begin{align*}&\boldsymbol{v}\cdot\boldsymbol{w}=\boldsymbol{w}\cdot\boldsymbol{v}\tag{5}\\[6pt]&c(\boldsymbol{v}\cdot\boldsymbol{w})=(c\boldsymbol{v})\cdot\boldsymbol{w}\tag{6}\\[6pt]&(\boldsymbol{u}+\boldsymbol{v})\cdot\boldsymbol{w}=\boldsymbol{u}\cdot\boldsymbol{w}+\boldsymbol{v}\cdot\boldsymbol{w}\tag{7}\end{align*}\]
もう少し先の記事で行列について学ぶことになりますが、ベクトル $\boldsymbol{v},\ \boldsymbol{w}$ を $1$ 列の行列と考えて、内積を $\boldsymbol{v}^T\boldsymbol{w}$ と表記することもできます。$\boldsymbol{v}^T$ は $\boldsymbol{v}$ を転置して要素を横に並べた行ベクトルです。
\[\boldsymbol{v}^T=\begin{bmatrix}v_1&v_2&…&v_n\end{bmatrix}\tag{8}\]
行列表記と整合性がとれるので、講座の後半では行ベクトルによる表記が増えると思います。行ベクトルを $\boldsymbol{v}=(v_1,\ v_2,\ …)$ と混同しないように注意してください。$()$ で括ってカンマで区切るベクトルは、普段使っている列ベクトルを便宜上横書きにしているだけです。
numpy.dot()
numpy.dot(a, b) は行列積を計算する関数です。a, b に 1 次元配列(ベクトル)をわたせば内積を返します (1 列の行列同士の積はベクトルの内積と同じです)。
# numpy_inner_product_1 # In[1] import numpy as np # ベクトルv=[3 2 6] v = np.array([3, 2, 6]) # ベクトルw=[4 7 2] w = np.array([4, 7, 2]) # vとwの内積を計算 ip = np.dot(v, w) print(ip) # 38
ndarray.dot()
配列 (ndarrayオブジェクト) には内積を計算する dot() メソッドがあります。
# In[2] # ベクトルv=[3 2 6] v = np.array([3, 2, 6]) # ベクトルw=[4 7 2] w = np.array([4, 7, 2]) # vとwの内積を計算 ip = v.dot(w) print(ip) # 38
numpy.vdot()
numpy.vdot(a, b) にベクトル(1 次元配列)を渡して内積を計算できます。
# numpy_inner_product_2 # In[1] import numpy as np # ベクトルv=[7+2i 3+i] v = np.array([7 + 2j, 3 + 1j]) # ベクトルw=[4+5i 8] w = np.array([4 + 5j, 8]) # vとwの内積を計算 ip = np.dot(v, w) print(ip) # 42+51j
numpy.vdot() の引数 a, b に 2 次元以上の配列を渡すと、1 次元配列に平坦化してから内積を計算します(テンソル複内積)。
# In[2]
# 行列a
a = np.array([[1, 4],
[3, 5]])
# 行列b
b = np.array([[3, 7],
[4, 9]])
# 1*3+4*7+3*4+5*9
ip = np.vdot(a, b)
print(ip)
# 88
numpy.inner()
numpy.inner(a, b) にベクトル (1 次元配列) を渡して内積を計算することができます。
# numpy_inner_product_3 # In[1] import numpy as np # ベクトルv=[2 5 0] v = np.array([2, 5, 0]) # ベクトルw=[3 1 4] w = np.array([3, 1, 4]) # vとwの内積を計算 ip = np.inner(v, w) print(ip) # 11
引数 a, b に行列を渡すと、a と b.T の行列積を返します (b.T は b の転置行列)。すなわち、np.dot(a, b.T) と同じ結果を返します。
内積の幾何学的意味
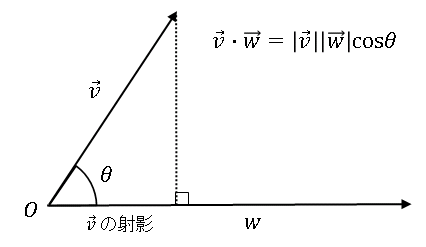
ベクトル $\boldsymbol{v}$ と $\boldsymbol{w}$ のなす角を $\theta$ とすると、二つのベクトルの内積は
\[\boldsymbol{v}\cdot\boldsymbol{w}=\parallel\boldsymbol{v}\parallel\parallel\boldsymbol{w}\parallel\cos\theta\tag{10}\]
と表されます。この定義は (1) と同値であり(余弦定理を使って証明できます)、幾何学的には下図のように $\boldsymbol{v}$ の射影と $\boldsymbol{w}$ の長さの積を意味します。
2 つのベクトルのなす角度が直角であるとき、射影がなくなるので内積は $0$ になることがわかります(下図)。
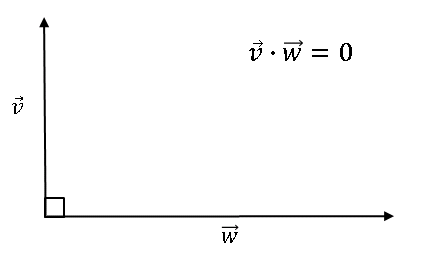
たとえば、$\begin{bmatrix}1\\0\end{bmatrix}$ と $\begin{bmatrix}0\\1\end{bmatrix}$ は互いに直交するので内積は $0$ です。
また、式 (10) より、ベクトル $\boldsymbol{v}$ と $\boldsymbol{w}$ の間の角度の余弦 (cosine) は
\[\cos\theta=\frac{\boldsymbol{v}\cdot\boldsymbol{w}}{\parallel\boldsymbol{w}\parallel\parallel\boldsymbol{v}\parallel}\tag{11}\]
となるので、$\cos$ の逆関数 $\mathrm{Arccos}$ を使うと、
\[\theta=\mathrm{Arccos}\left(\frac{\boldsymbol{v}\cdot\boldsymbol{w}}{\parallel\boldsymbol{v}\parallel\parallel\boldsymbol{w}\parallel}\right)\tag{12}\]
によって角度を計算できます。4 次元以上のベクトルのなす角度も(想像するのは難しいですが)、(12) で定義できます。Python で角度を求める関数を実装してみましょう。
# python_vector_angle
# In[1]
import numpy as np
# 2つのベクトルのなす角度を求める関数
def v_angle(v1, v2, deg = False):
# v1とv2の大きさ(ノルム)を計算
v1_n = np.linalg.norm(v1)
v2_n = np.linalg.norm(v2)
# v1とv2の内積を計算
v1_dot_v2 = np.dot(v1, v2)
# 角度の余弦を計算
cos_theta = v1_dot_v2 / (v1_n * v2_n)
# 逆三角関数を使って角度を計算
theta = np.arccos(cos_theta)
# 引数degがTrueならば、角度を度数単位(degree)に変換
if deg == True:
theta = np.degrees(theta)
return theta
deg は結果を度数法単位 (deg) とラジアン (rad) のどちらで返すか決定するオプション引数です。デフォルトでは False に設定されているので、この引数を省略するとラジアンで返してきます。
v_angle() を使って、$\begin{bmatrix}1\\0\end{bmatrix}$ と $\begin{bmatrix}1\\\sqrt{3}\end{bmatrix}$ の間の角度を求めてみましょう。
deg は True に設定して結果を度数単位で返すようにします。
# In[2]
# ベクトルを定義
v = np.array([1, 0])
w = np.array([1, np.sqrt(3)])
# vとwの間の角度を計算
theta = v_angle(v, w, deg = True)
print("θ = {:.3f}".format(theta))
# θ = 60.000
世界標準MIT教科書|ストラング:線形代数とデータサイエンス ● 新品価格 |  |
≫ Pythonで学ぶ線形代数トップページ
コメント
下記は誤植と思われますので、ご確認ください。
式(11)の上の文章で、式(6)より → 式(10)より
式(12)の下の文章で、(2)で定義 → (12)で定義
いつもありがとうございますm(_ _)m
記事を訂正させていただきました。