
正射影ベクトルと射影行列
今回の記事ではベクトルを互いに垂直な 2 つのベクトルに分解する手法を学びます。物理学を学んだことのある人にとっては、物体に作用する力の分解などでお馴染みの作業です。しかし、ベクトルの分解には、そうした便宜的手法以上の深い意味が隠されています。
直線への正射影
下図のように、2 つのベクトル $\boldsymbol{v},\ \boldsymbol{a}$ が与えられたとします。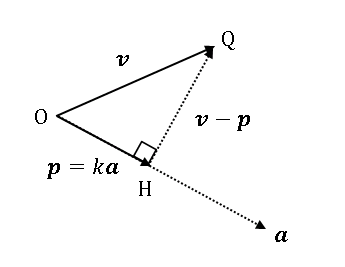 $\boldsymbol{v}$ の終端 $\mathrm{Q}$ から $\boldsymbol{a}$ に沿う直線に垂線を下ろし、この直線と交わる点を $\mathrm{H}$ とします。このとき $\mathrm{O}$ を始点、$\mathrm{H}$ を終点とするベクトル $\boldsymbol{p}$ を $\boldsymbol{v}$ の $\boldsymbol{a}$ に対する 正射影ベクトル とよびます。
$\boldsymbol{v}$ の終端 $\mathrm{Q}$ から $\boldsymbol{a}$ に沿う直線に垂線を下ろし、この直線と交わる点を $\mathrm{H}$ とします。このとき $\mathrm{O}$ を始点、$\mathrm{H}$ を終点とするベクトル $\boldsymbol{p}$ を $\boldsymbol{v}$ の $\boldsymbol{a}$ に対する 正射影ベクトル とよびます。
直感的には、$\boldsymbol{a}$ に垂直な光を $\boldsymbol{v}$ に当てたときに、直線 $OH$ に落ちる影が正射影です。  $\boldsymbol{p}$ は $\boldsymbol{a}$ に平行なので、$\boldsymbol{p}=k\boldsymbol{a}$ の形で表せるはずです。最初の図にあるように、$\boldsymbol{v}-\boldsymbol{p}$ は $\boldsymbol{a}$ に垂直なので、内積をとると $0$ になります。すなわち条件式
$\boldsymbol{p}$ は $\boldsymbol{a}$ に平行なので、$\boldsymbol{p}=k\boldsymbol{a}$ の形で表せるはずです。最初の図にあるように、$\boldsymbol{v}-\boldsymbol{p}$ は $\boldsymbol{a}$ に垂直なので、内積をとると $0$ になります。すなわち条件式
\[\boldsymbol{a}^T(\boldsymbol{v}-k\boldsymbol{a})=0\tag{1}\]
を使って $k$ を求めると
\[k=\frac{\boldsymbol{a}^T\boldsymbol{v}}{\boldsymbol{a}^T\boldsymbol{a}}\tag{2}\]
となります。分母は同じベクトルの内積なので、$\parallel\boldsymbol{a}\parallel^2$ と書くこともできますが、より一般化された正射影ベクトルの表記に合わせて、このままにしておきます。
正射影ベクトル $\boldsymbol{p}$ は
\[\boldsymbol{p}=\frac{\boldsymbol{a}^T\boldsymbol{v}}{\boldsymbol{a}^T\boldsymbol{a}}\boldsymbol{a}\tag{3}\]
と表されます。$k$ の求め方さえ知っていれば、いつでも正射影ベクトルをつくることはできますが、$\boldsymbol{v}$ から $\boldsymbol{p}$ への変換行列で表現したほうが線形代数の流儀に沿っています(これは半分冗談です。流儀というだけでなく、この種の変換を部分空間の視点で捉えるためには表現行列は必須です)。
正射影ベクトル $\boldsymbol{p}=k\boldsymbol{a}$ において、$k$ はスカラーなので $\boldsymbol{p}=\boldsymbol{a}k$ と書いても同じことです。すなわち $\boldsymbol{p}$ は
\[\boldsymbol{p}=\boldsymbol{a}\frac{\boldsymbol{a}^T\boldsymbol{v}}{\boldsymbol{a}^T\boldsymbol{a}}\tag{4}\]
のように書き直せます。さらに、結合法則によって分子は $(\boldsymbol{a}\boldsymbol{a}^T)\boldsymbol{v}$ の順で計算できるので、
\[\boldsymbol{p}=\frac{\boldsymbol{a}\boldsymbol{a}^T}{\boldsymbol{a}^T\boldsymbol{a}}\boldsymbol{v}\tag{5}\]
のように書くこともできます。線形変換 $P\boldsymbol{v}$ によって正射影ベクトル (3) が得られたと考えるならば、
\[P=\frac{\boldsymbol{a}\boldsymbol{a}^T}{\boldsymbol{a}^T\boldsymbol{a}}\tag{6}\]
と表されます。$P$ を 射影行列 とよびます。分子と分母は $\boldsymbol{a}$ と $\boldsymbol{a}^{T}$ を掛ける順序が逆になっているだけですが、$\boldsymbol{a}\boldsymbol{a}^T$ は行列、$\boldsymbol{a}^T\boldsymbol{a}$ はスカラーとなります。
たとえば、$\boldsymbol{a}$ が 2 次元ベクトル $\boldsymbol{a}=\begin{bmatrix}a_1\\a_2\end{bmatrix}$ である場合、
\[\boldsymbol{a}\boldsymbol{a}^T=\begin{bmatrix}a_1\\a_2\end{bmatrix}\begin{bmatrix}a_1&a_2\end{bmatrix}=\begin{bmatrix}a_1^2&a_1a_2\\a_1a_2&a_2^2\end{bmatrix}\tag{7}\]
となります。
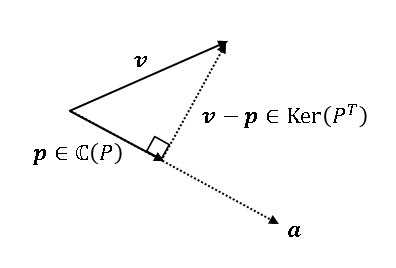
ここから本質的な話に踏み込んでいきます。正射影ベクトルをつくることは、これまで学んできた 部分空間 への分解そのものです。たとえば、$\boldsymbol{v}$ が $\mathbb{R}^2$ を代表するベクトル $\boldsymbol{v}=\begin{bmatrix}x\\y\end{bmatrix}$ だとすれば、行列 $P$ による線形変換 $P\boldsymbol{v}=\boldsymbol{p}$ は $\mathbb{R}^2$ の列空間 $\mathbb{C}(P)$ であり、$\boldsymbol{p}$ に垂直な $\boldsymbol{v}-\boldsymbol{p}$ は $P$ の左零空間 $\mathrm{Ker}P^T$ となります。
 つまり $\mathbb{R}^2$ で正射影ベクトルをつくることは、平面全体をそれぞれの次元が 1 である 2 つの部分空間 (2 本の直線) に分解することを意味します。最も簡単な例をみましょう。$\boldsymbol{v}$ を平面上の任意のベクトル、$\boldsymbol{a}$ を $x$ 軸上の単位ベクトルとします。
つまり $\mathbb{R}^2$ で正射影ベクトルをつくることは、平面全体をそれぞれの次元が 1 である 2 つの部分空間 (2 本の直線) に分解することを意味します。最も簡単な例をみましょう。$\boldsymbol{v}$ を平面上の任意のベクトル、$\boldsymbol{a}$ を $x$ 軸上の単位ベクトルとします。
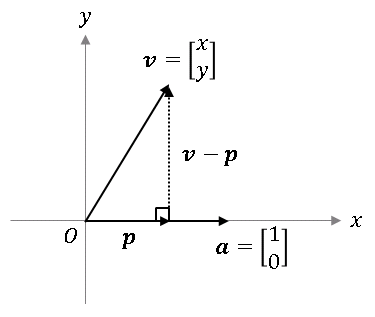
結果は自明なので、馬鹿げていると思うかもしれませんが、敢えて射影行列を使って正射影ベクトルを求めてみます。射影行列は
\[P=\frac{\boldsymbol{a}\boldsymbol{a}^T}{\boldsymbol{a}^T\boldsymbol{a}}=\boldsymbol{a}\boldsymbol{a}^T=\begin{bmatrix}1\\0\end{bmatrix}\begin{bmatrix}1&0\end{bmatrix}=\begin{bmatrix}1&0\\0&0\end{bmatrix}\tag{8}\]
となるので、
\[\boldsymbol{p}=P\boldsymbol{v}=\begin{bmatrix}1&0\\0&0\end{bmatrix}\begin{bmatrix}x\\y\end{bmatrix}=\begin{bmatrix}x\\0\end{bmatrix}\tag{9}\]
ついでに $\boldsymbol{v}-\boldsymbol{p}$ も求めておきましょう。
\[\boldsymbol{v}-\boldsymbol{p}=\begin{bmatrix}x\\y\end{bmatrix}-\begin{bmatrix}x\\0\end{bmatrix}=\begin{bmatrix}0\\y\end{bmatrix}\tag{10}\]
射影行列 $P$ によって、$\mathbb{R}^2$ 全体は $x$ 軸と $y$ 軸に分解されました。
平面への正射影
今度は $\mathbb{R}^3$ における線形独立な 2 つのベクトル $\boldsymbol{a}_1,\ \boldsymbol{a}_2$ によって張られる平面への射影について考えます。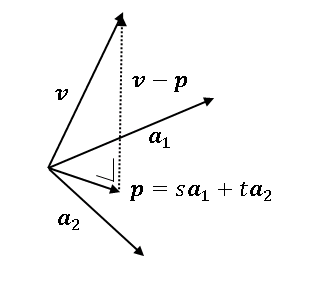 基本的な考え方は直線への射影と同じですが、今回は求めるべき変数が 2 つになります。すなわち、$\boldsymbol{a}_1$ と $\boldsymbol{a}_2$ の線形結合
基本的な考え方は直線への射影と同じですが、今回は求めるべき変数が 2 つになります。すなわち、$\boldsymbol{a}_1$ と $\boldsymbol{a}_2$ の線形結合
\[\boldsymbol{p}=s\boldsymbol{a}_1+t\boldsymbol{a}_2\tag{11}\]
がちょうど $\boldsymbol{v}$ の終端の真下にくるように $s$ と $t$ を決定します。$\boldsymbol{p}$ を $\boldsymbol{a}_1,\ \boldsymbol{a}_2$ を横に並べた行列で表すと
\[\boldsymbol{p}=\begin{bmatrix}\boldsymbol{a}_1&\boldsymbol{a}_2\end{bmatrix}\begin{bmatrix}s\\t\end{bmatrix}\tag{12}\]
となります。ここで行列 $A$ とベクトル $\boldsymbol{x}$ を
\[A=\begin{bmatrix}\boldsymbol{a}_1&\boldsymbol{a}_2\end{bmatrix},\quad \boldsymbol{x}=\begin{bmatrix}s\\t\end{bmatrix}\]
のように定義すると、$\boldsymbol{p}=A\boldsymbol{x}$ と表せます。
$\boldsymbol{a}_1,\ \boldsymbol{a}_2$ はそれぞれ $\boldsymbol{v}-\boldsymbol{p}$ と垂直 (内積が $0$) なので、
\[\begin{align*}\boldsymbol{a}_1^T(\boldsymbol{v}-A\boldsymbol{x})=0\tag{13}\\[6pt]\boldsymbol{a}_2^T(\boldsymbol{v}-A\boldsymbol{x})=0\tag{14}\end{align*}\]
が $s$ と $t$ を決定する条件式となります。
\[A^T=\begin{bmatrix}\boldsymbol{a}_1^T\\\boldsymbol{a}_2^T\end{bmatrix}\tag{15}\]
とおいて行列形式でまとめると、
\[A^T(\boldsymbol{v}-A\boldsymbol{x})=0\tag{16}\]
となります。少し変形すると
\[A^TA\boldsymbol{x}=A^T\boldsymbol{v}\tag{17}\]
となります。転置行列の性質 より、$A$ が矩形行列であっても $A^TA$ は常に正方行列です。$A$ を構成するベクトルが線形独立であれば、$\det A\neq 0,\ \det A^T\neq 0$ より、$\det(A^TA)=\det A^T\det A\neq 0$ なので、$A^TA$ には逆行列が存在します。この逆行列を等式 (17) の両辺にかけると
\[\boldsymbol{x}=(A^TA)^{-1}A^T\boldsymbol{v}\tag{18}\]
が得られます。よって、正射影ベクトルは
\[\boldsymbol{p}=A\boldsymbol{x}=A(A^TA)^{-1}A^T\boldsymbol{v}\tag{19}\]
で与えられ、$\boldsymbol{v}$ を $\boldsymbol{p}$ に変換する射影行列は
\[P=A(A^TA)^{-1}A^T\tag{20}\]
で表されます。
$x$ 軸と $y$ 軸に沿う単位ベクトル
\[\boldsymbol{a}_1=\begin{bmatrix}1\\0\\0\end{bmatrix},\quad\boldsymbol{a}_2=\begin{bmatrix}0\\1\\0\end{bmatrix}\tag{21}\]
によって張られる平面に対する、$\mathbb{R}^3$ のベクトル $\boldsymbol{v}=\begin{bmatrix}x\\y\\z\end{bmatrix}$ の正射影ベクトルを求めてみます。$A$ は $3\times 2$ の矩形行列です。
\[A=\begin{bmatrix}\boldsymbol{a}_1&\boldsymbol{a}_2\end{bmatrix}=\begin{bmatrix}1&0\\0&1\\0&0\end{bmatrix}\tag{22}\]
射影行列を計算すると $3\times 3$ の正方行列を得ます:
\[P=A(A^TA)^{-1}A^T=\begin{bmatrix}1&0&0\\0&1&0\\0&0&0\end{bmatrix}\tag{23}\]
$\mathbb{R}^3$ のベクトル $\boldsymbol{v}$ に $P$ を作用させると
\[P\boldsymbol{v}=\begin{bmatrix}1&0&0\\0&1&0\\0&0&0\end{bmatrix}\begin{bmatrix}x\\y\\z\end{bmatrix}=\begin{bmatrix}x\\y\\0\end{bmatrix}\tag{24}\]
このように、$P$ は $\mathbb{R}^3$ に属する任意のベクトルの $x$ 成分と $y$ 成分を抜き出す行列なので、$P$ の列空間は $xy$ 平面です。$P^T\boldsymbol{v}=\boldsymbol{0}$ を解くと $x=y=0$, $z$ は任意定数となるので、$P$ の左零空間は $z$ 軸です。すなわち、$xy$ 平面と $z$ 軸は $\mathbb{R}^3$ の直交補空間です。
正射影の一般定義
以上の議論は $\mathbb{R}^n$ 空間における任意次元の部分空間への射影にそのまま適用できます。
すなわち、$\boldsymbol{a}_1,\ \boldsymbol{a}_2,\ \boldsymbol{a}_3…$ によって張られる部分空間に対する正射影ベクトルは、すべての基底ベクトルに垂直になるように決定します。
\[\begin{align*}\boldsymbol{a}_1^T(\boldsymbol{v}-A\boldsymbol{x})=0\\[6pt]
\boldsymbol{a}_2^T(\boldsymbol{v}-A\boldsymbol{x})=0\\[6pt]
\boldsymbol{a}_3^T(\boldsymbol{v}-A\boldsymbol{x})=0\\[6pt]\cdots\cdots\cdots\cdots\end{align*}\]
$\boldsymbol{a}_1,\ \boldsymbol{a}_2,\ \boldsymbol{a}_3…$ を横に並べた行列を $A$ とおけば、(19) と同じ式
\[P=A(A^TA)^{-1}A^T\tag{25}\]
を得ることができます。次元が大きくなると、(25) の計算は手間がかかります。SciPy から線形代数ライブラリをインポートして、射影行列を返す関数を定義しましょう。
# python_orthographic_projection
# In[1]
import numpy as np
from scipy import linalg
# 射影行列生成関数
def projection_matrix(x):
return x @ linalg.inv(x.T @ x) @ x.T
$\mathbb{R}^4$ すなわち 4 次元空間内で、3 つの基底ベクトルによって張られる部分空間への正射影ベクトルを計算してみます。
# In[2]
# 3個の基底ベクトルを並べた行列を定義
A = np.array([[1, 0, 0],
[0, 1, 0],
[0, 0, 1],
[0, 0, 2]])
# Aの射影行列
P = projection_matrix(A)
# 4次元ベクトル
v = np.array([[2, 3, 1, 1]]).T
# ベクトルvの3次元空間への正射影ベクトル
Pv = P @ v
print("射影行列:\n{}\n".format(P))
print("正射影ベクトル:\n{}".format(Pv))
'''
射影行列:
[[1. 0. 0. 0. ]
[0. 1. 0. 0. ]
[0. 0. 0.2 0.4]
[0. 0. 0.4 0.8]]
正射影ベクトル:
[[2. ]
[3. ]
[0.6]
[1.2]]
'''
コメント
下記は誤植と思われますので、ご確認ください。
(4) 式の下の文章で、a と a をかける → a と a^T をかける
(15) 式の下の文章で、det A^T A= → det(A^T A)=
貴重なお時間を割いていただき、ありがとうございます。m(_ _)m
訂正しておきました。
(4) 式の導出では、(a^T v) a において (a^T v) はスカラーだから 交換法則で a (a^T v)は OK。
結合法則で (a a^T) v も OK と考えたり、実際に a=[a1 a2]^T, v=[v1, v2]^T を式に代入して計算してOKでしたので納得はするのですが、このような考え方でよかったでしょうか。
はい、全くその通りです。正射影ベクトル
\[\boldsymbol{p}=k\boldsymbol{a}\]において、$k$ はスカラーなので
\[\boldsymbol{p}=\boldsymbol{a}k\]と書いても同じことなので、
\[\boldsymbol{p}=\boldsymbol{a}\frac{\boldsymbol{a}^T\boldsymbol{v}}{\boldsymbol{a}^T\boldsymbol{a}}\]と表せます。おっしゃるように結合法則によって分子は $(\boldsymbol{a}\boldsymbol{a}^T)\boldsymbol{v}$ の順で計算しても構いません。よって、
\[\boldsymbol{p}=\frac{\boldsymbol{a}\boldsymbol{a}^T}{\boldsymbol{a}^T\boldsymbol{a}}\boldsymbol{v}\]と表せば、正射影行列は
\[P=\frac{\boldsymbol{a}\boldsymbol{a}^T}{\boldsymbol{a}^T\boldsymbol{a}}\]となります。この式の導出は説明が足りなかったかもしれません。後で本文も書き直しておきます。
いつもこのサイトで学ばせていただいています。わかりやすい解説をありがとうございます。
独学で線形代数学んでるので、頓珍漢な質問だったら申し訳ありません
In[2]についてですが、4次元ベクトルvの正射影ベクトルを3次元空間に投射するなら、Aの4行目3列目は1ではなく0にならないでしょうか?
プログラムでは正射影ベクトルは4つの基底を持って出力されているように見えます。
申し訳ないです。
In[2] の上の説明文で「四次元ベクトルを三次元空間に射影する」と書いていましたが、正しくは「四次元ベクトルを(四次元)部分空間に射影する」です。記事はすでに訂正させていただきました。三次元空間内の 2 つの基底で張られる平面上の各点が三次元ベクトルで表されるのと同様に、四次元空間内の 3 つの基底で張られる部分空間の各点は四次元ベクトルです。
In[2] も少し変えておきましたので、ご確認ください。
いつも当サイトをご利用いただき、ありがとうございます。
引き続きよろしくお願いいたします。m(_ _)m
なるほど、正射影行列は同一次元の空間で一つ基底を減らしたベクトルに変換する行列ということですね。納得できましたありがとうございます。
つまり、場合によっては生成した正射影ベクトルがその行列の核に含まれることもあり得えますよね?
ありえます。射影行列 $P$ によって、あるベクトル $\boldsymbol{v}$ が射影ベクトル $\boldsymbol{w}$ に線形変換されたとします。
\[\boldsymbol{w}=P\boldsymbol{v}\]このとき、
\[P\boldsymbol{w}=0\]を満たすならば、$\boldsymbol{w}$ は $P$ の核に含まれることになります。$\boldsymbol{w}$ が零ベクトルであれば上の式は必ず満たしますが、それ以外の非自明な解もありえます。$\mathbb{R}^2$ において、任意のベクトル $\boldsymbol{v}=(x,y)$ を $x$ 軸上の点 $(x+y,0)$ に射影する行列\[P=\begin{bmatrix}1&1\\0&0\end{bmatrix}\]を例に考えてみます。$P$ によって任意のベクトル $\boldsymbol{v}$ を変換すると、
\[\boldsymbol{w}=P\boldsymbol{v}=\begin{bmatrix}x+y\\0\end{bmatrix}\]となります。$\boldsymbol{w}$ を $P$ で変換すると、
\[P\boldsymbol{w}=\begin{bmatrix}x+y\\0\end{bmatrix}\]となるので、$x+y=0$ を満たすようなベクトルはすべて $P$ の核に含まれます。
ベクトル空間に関して線形代数の部分は、中国での用語習慣と遠く離れています、先生の丁寧な説明は本当に助かりますわい!
ありがとう!
コメントありがとうございます。
このサイトを学習に役立てていただけると、私も嬉しいです。
次の記事の完全正規直交系も、ベクトル空間を理解する上でとても大事な概念です。ぜひ楽しんで勉強してください。